Abstract
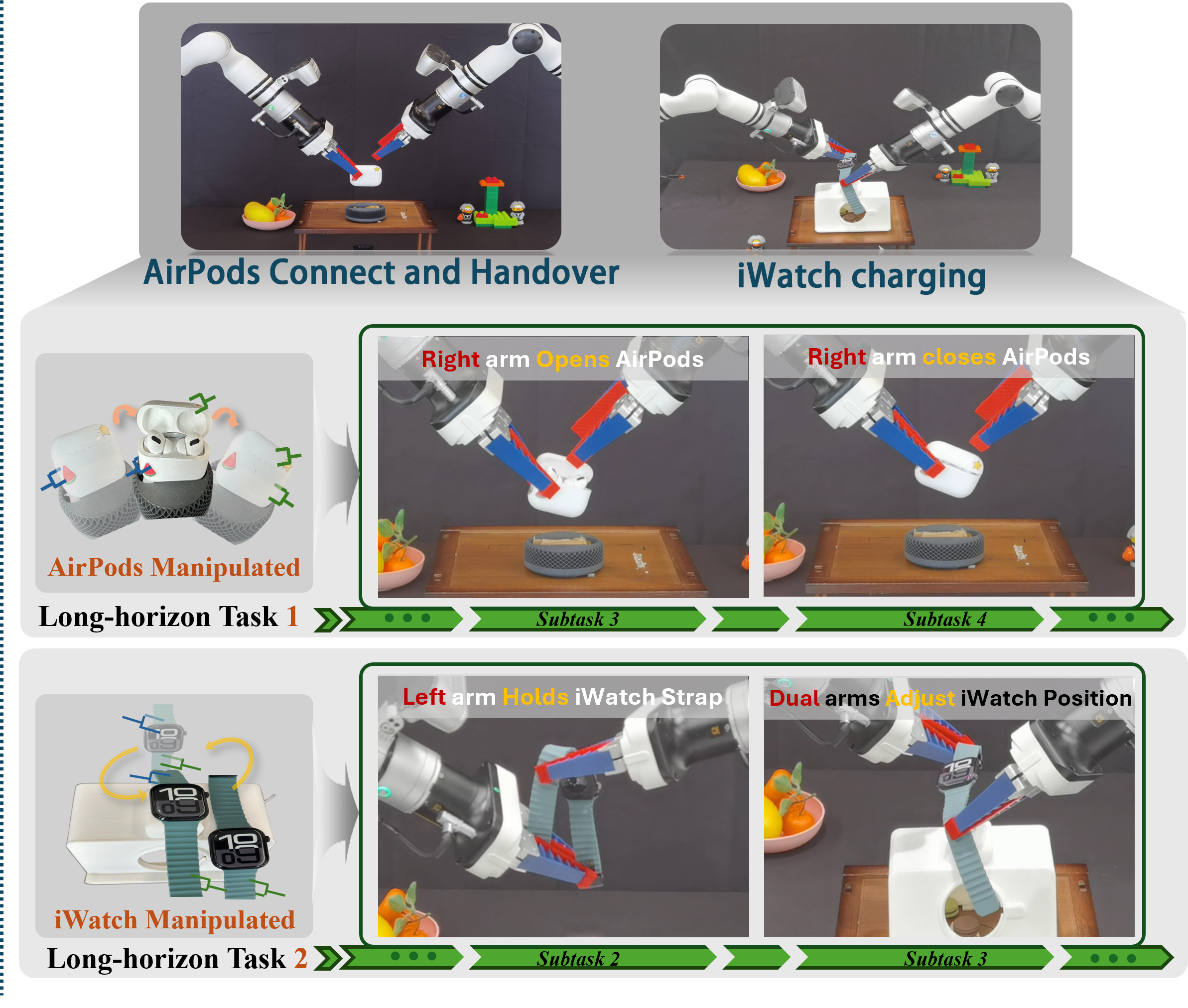
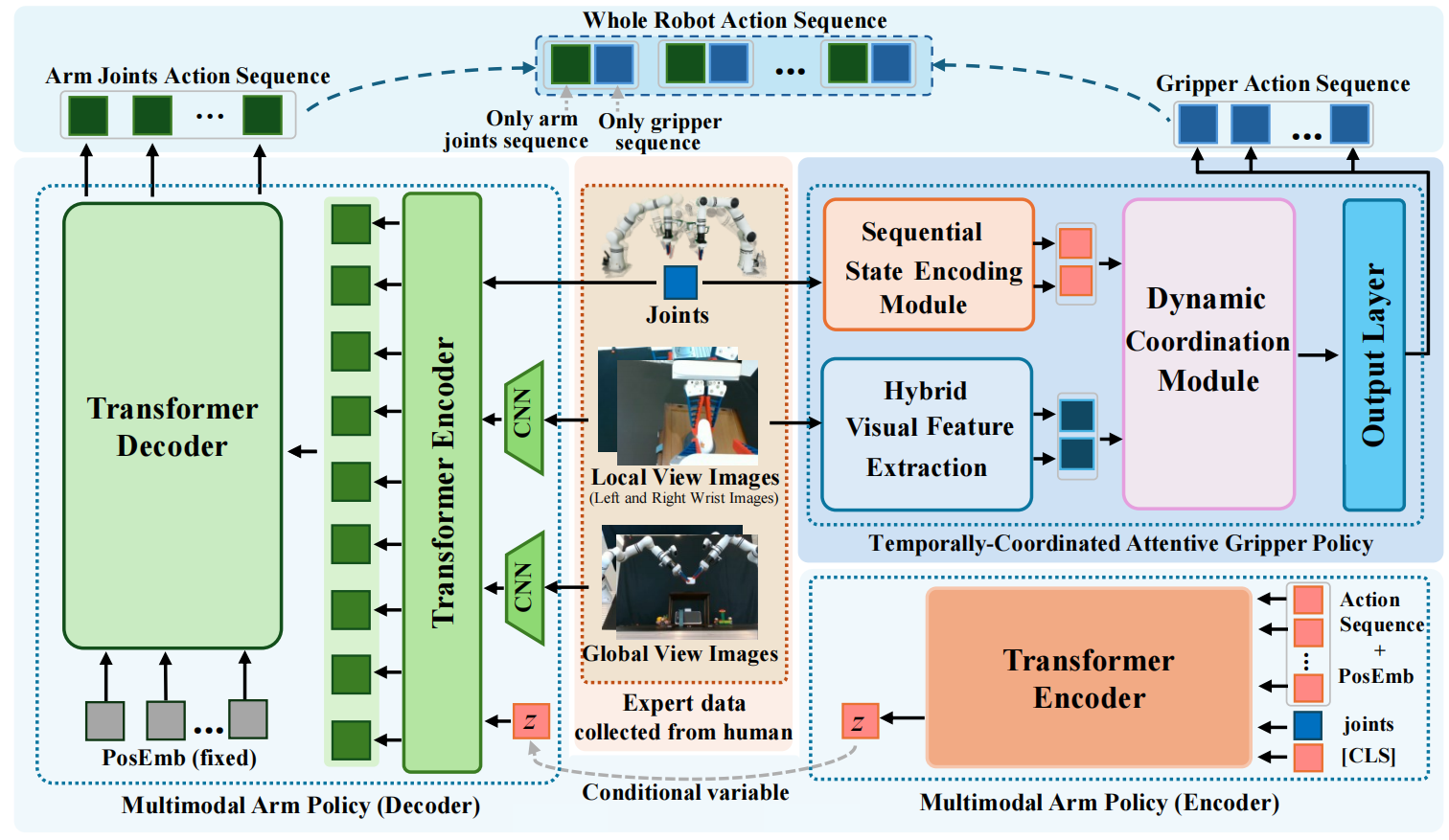
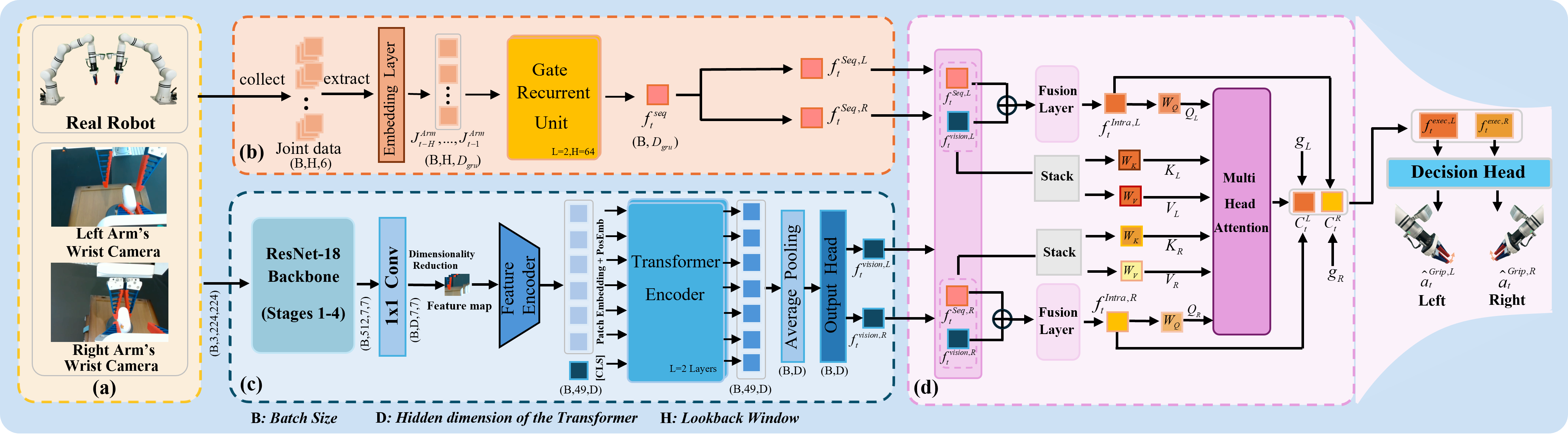
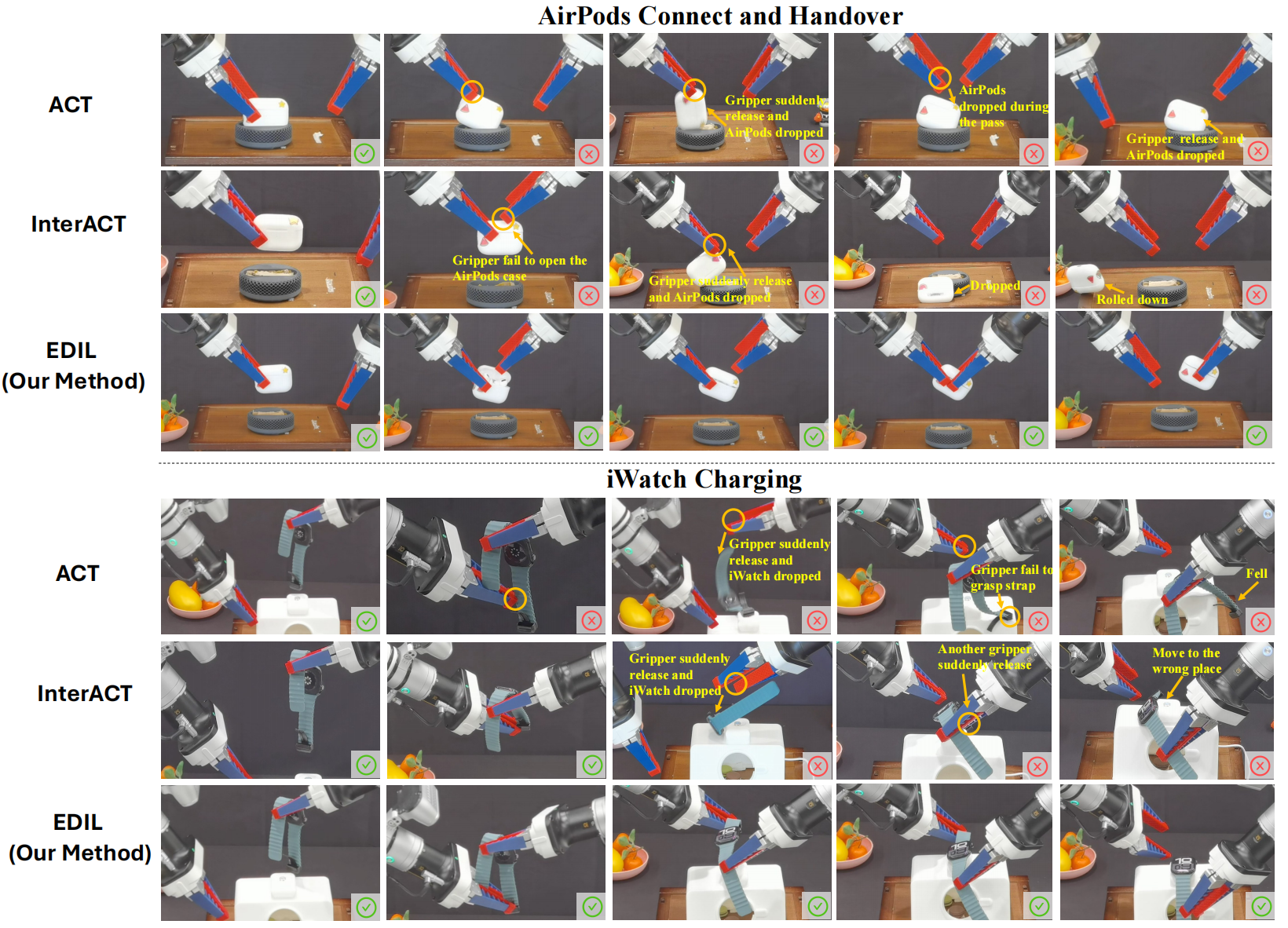
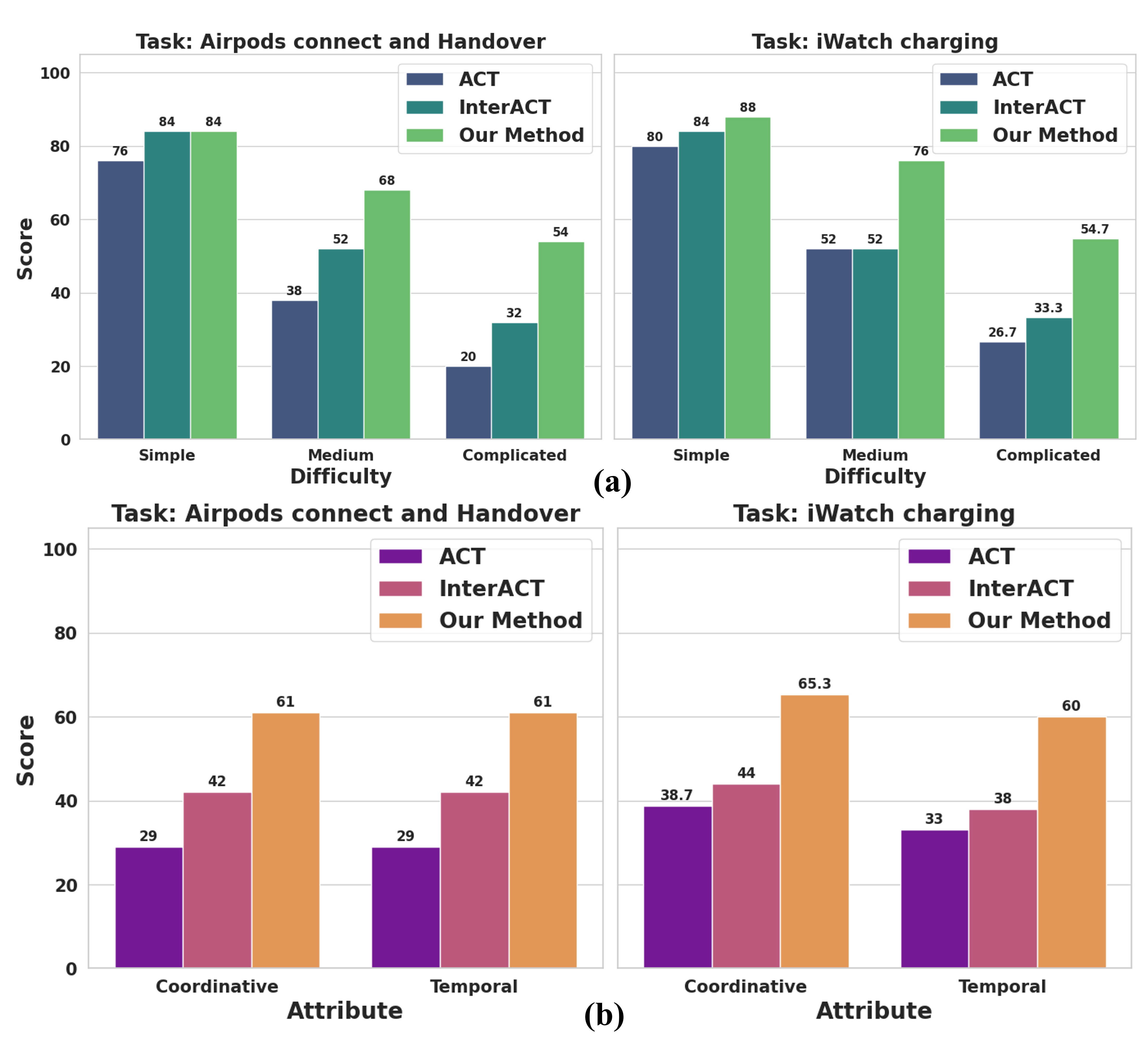
As a critical capability for automating complex industrial tasks like precision assembly, bimanual fine-grained manipulation has become a key area of research in robotics, where end-to-end imitation learning (IL) has emerged as a prominent paradigm. However, in long-horizon cooperative tasks, prevalent end-to-end methods suffer from an inadequate representation of critical task features, particularly those essential for fine-grained coordination between the arms and grippers. This deficiency often destabilizes the manipulation policy, leading to issues like spurious gripper activations and culminating in task failure. To address this challenge, we propose an end-to-end Decoupled Imitation Learning (EDIL) method, which decouples the bimanual manipulation task into a Multimodal Arm Policy for global trajectories and a Temporally-Coordinated Attentive Gripper Policy for fine end-effector actions. The arm policy leverages a Transformer-based encoder-decoder architecture to learn multimodal trajectory from expert demonstrations. The gripper policy leverages cross-attention to facilitate implicit, dynamic feature sharing between the arms, integrating sequential state history and visual data to ensure cooperative stability. We evaluated EDIL on two challenging long-horizon manipulation tasks comprising 10 subtasks in total. Experimental results demonstrate that our method significantly outperforms state-of-the-art approaches, particularly on more complex subtasks, showcasing its robustness and effectiveness.
Second image description.
Second image description.
Second image description.
Third image description.
Third image description.
Fourth image description.
BibTeX
Waiting...